最近、RMチェッカーをマシンに載せた状態で走らせて、走行中のデータを取ることを試しているので、それについて時々こちらに投稿していきます
将来的には走行中の回転数だけでなく、加速度など様々なデータをセッティングに活かせたらと思うけど、とりあえずの目標は実走でモーターが受ける負荷を知ること
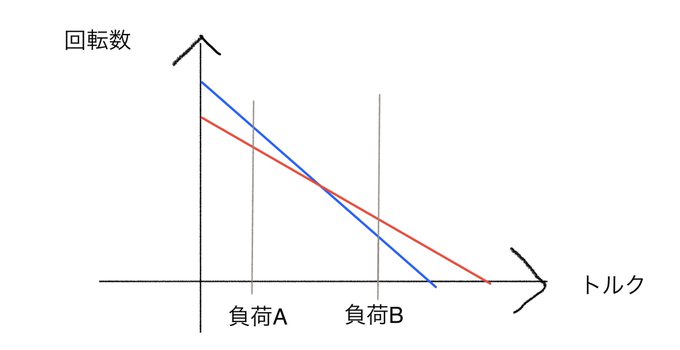
実走で速いモーターか調べるためにモーターを連結し、発電させることで負荷をかけた状態での回転数を比較する手法があるけど、どの程度の負荷を加えるべきか私はわかりませんでした
トルク(負荷)が大きくなるほど、回転数が小さくなりますが、その落ち具合(青赤線の傾き)はモーターによって異なります なので、与える負荷の大きさ次第で性能の優劣が変わるため、測定の際は実走の負荷に近いものを与えるべきだと考えいます (負荷Aだと青モータが速いがBだと赤モータになる)
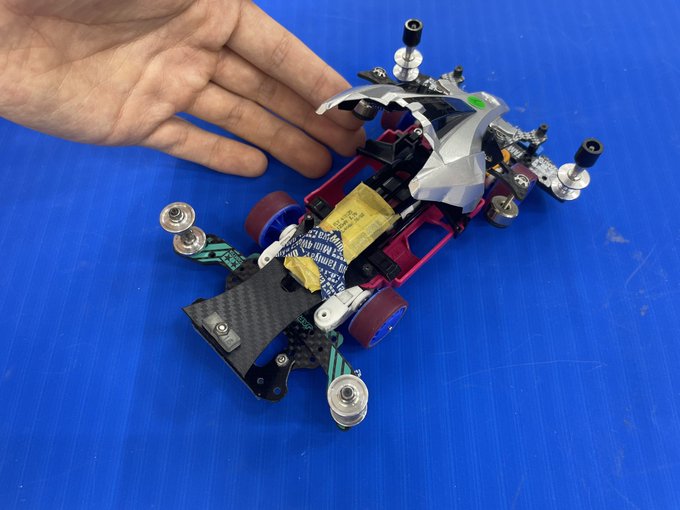
このような理由で始めたわけですが、最初はRMチェッカーの中身のマイコンをマスキングテープでマシンに貼り付けて、先月のコジカシの大会後にこちらのコースで試してみました

結果はこちら まだこれは原理試作段階なので縦のスケールは伏せていますが、ジャンプで浮いた際に回転が上がり、バンクで下に押された際に落ちているといったコースの特徴が読み取れました
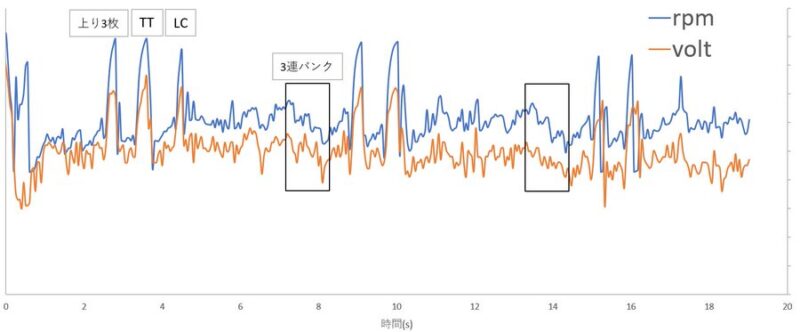
グラフ左端はスタート時、つまりRMチェッカーで測れる数値と同等になるわけですが、その後は回転数の低下に合わせて電圧も低下しています モーター性能を測る際は負荷の大きさもそうですが、電圧も3vは適切ではないかもしれませんね
試作一号機で走行中でも測れることは分かりましたが、データ確認のためにpcが必要だったり、センサの重量や取付に問題があり、使い勝手が良くないので改良していきます また、スタートとキャッチ時の回転数の急降下を検知できそうなので、それでタイム計測も自動化できないか試していきたいところ
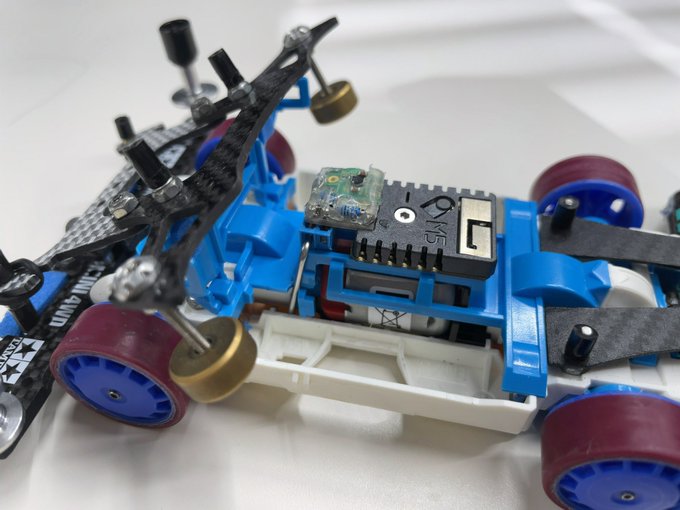
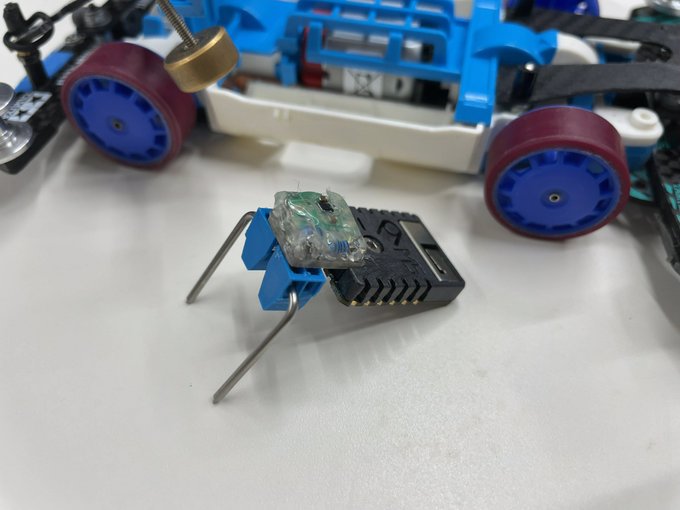
センサ本体の形は今のところ、この形で落ち着いています 重量は元が10gで5gまで減量 中空ペラシャがMSターミナルにいい感じに挟み込めて加工もしやすく、測定ピンとして優秀

コメント